
How VRS Work?
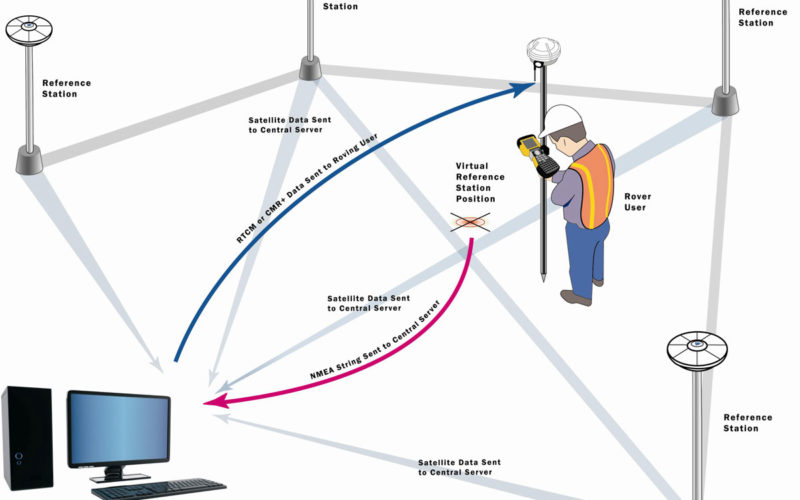
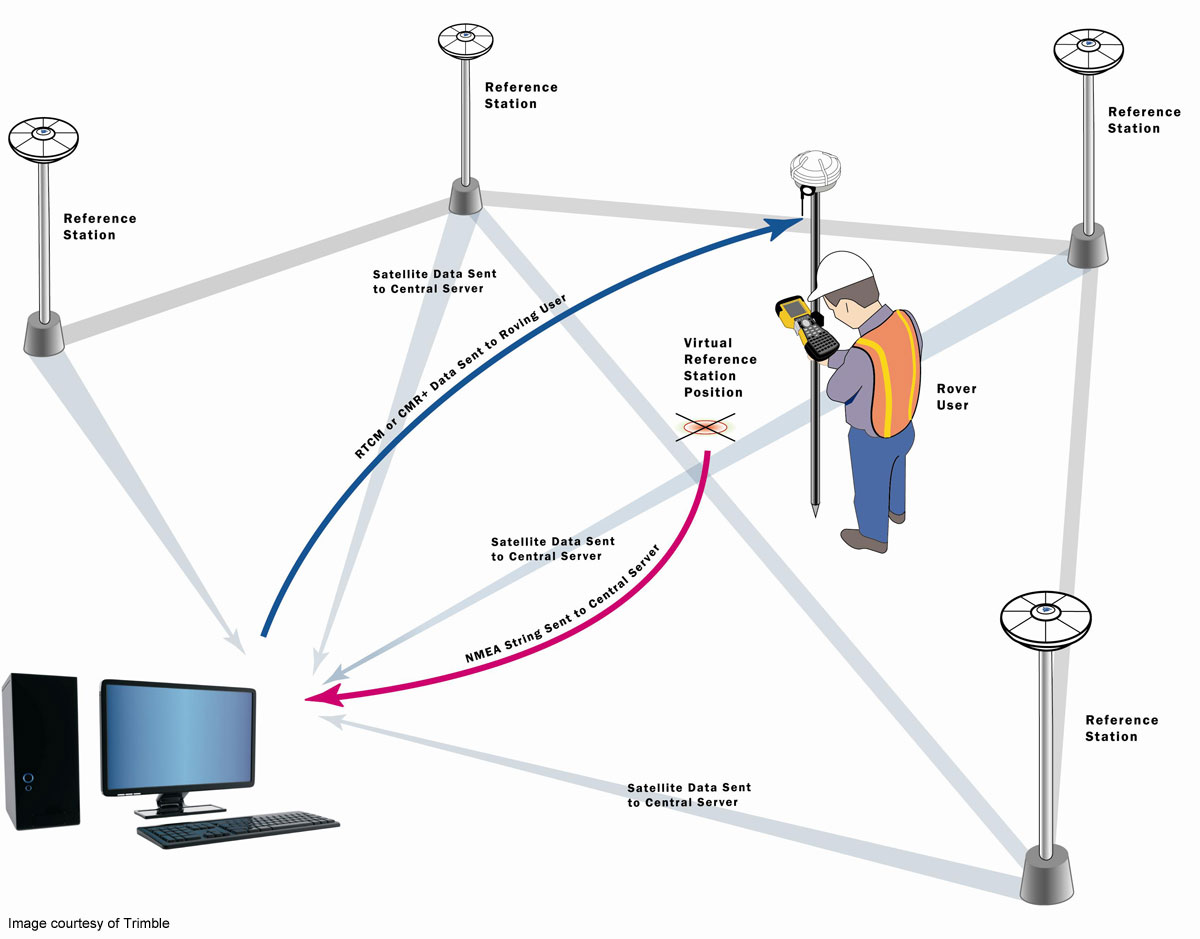
The general concept of “how VRS work” can be understood in Figure 1. which is basically network-based processing of VRS.
In Short:
- The data from the Reference Stations are transmitted to the processing and control center at a one-second interval.
- The RTK user sends his approximate position (NMEA string).
- The processing center determines in which triangle the user is stationed and computes a virtual reference station (as a function of the transmitted approximate position).
- The processing center transmits the data of the virtual reference station to the user (RTCM format).
In Detail:
The network of receivers is linked to a computation center, and each station contributes its raw data to help create network-wide models of the distance-dependent errors. The computation of errors based on the full network’s carrier phase measurements involves, first of all, the resolution of carrier-phase ambiguities and requires knowledge of the reference station positions. (The latter is usually determined as part of the network setup.)
At the same time, the rover calculates its approximate position and transmits this information to the computation server, for example, via GSM or GPRS using a standard National Marine Electronics Association (NMEA) format. The computation center generates in real-time a virtual reference station at or near the initial rover position. This is done by geometrically translating the pseudo-range and carrier phase data from the closest reference station to the virtual location and then adding the interpolated errors from the network error models.
This generated VRS data is then sent to the user through a wireless connection, often using the Networked Transport of RTCM via Internet Protocol (NTRIP). Finally, just as if the VRS data had come from a physical reference station, the rover receiver uses standard single-baseline algorithms to determine the coordinates of the user’s receiver, in near-real-time kinematic or post-processed modes.
The main purpose of a VRS station is to reduce the baseline distance between the rover and the reference station in order to efficiently remove spatially correlated errors using differential processing and to incorporate error corrections obtained from the reference stations network.
To this end, the position of the VRS plays a critical role. In particular, because the user receiver cannot, by design, distinguish a real reference station and a VRS, the distance of the VRS from the user must be commensurate with the level of errors present in the VRS data. This is what allows the receiver to use its standard data processing algorithms, which vary as a function of the baseline length (i.e., distance) to the reference station.
The VRS concept basically needs the resource of a physical GPS network surrounding the measurement area of the rover, with a minimum of three reference stations to enable the modeling of errors. However, the estimation accuracy increases as more physical reference stations are added to the network, especially as the number of stations exceeds five, at which point the increased redundancy and improved network geometry provide more accurate error modeling.
To conduct a survey employing a VRS network, the physical stations themselves must be installed over stable sites, preferably distributed homogeneously over the operational area. If possible, the antennas must be fixed in bedrock to ensure long term stability of the receiver’s position.
A Tour to Real World Situation:
The Swiss Automated GNSS Network for Switzerland (AGNES) (Figure 2) established by the Federal Office of Topography (swisstopo), which contains 30 stations with dual-frequency GPS/GLONASS receivers covering the entire 41,290-square kilometer surface area of Switzerland. AGNES incorporates an additional 19 foreign stations with the data from all 49 sites processed together to generate VRS solutions for the whole of Switzerland. At any location, an average length of 30 kilometers to the AGNES reference station is guaranteed across the country.
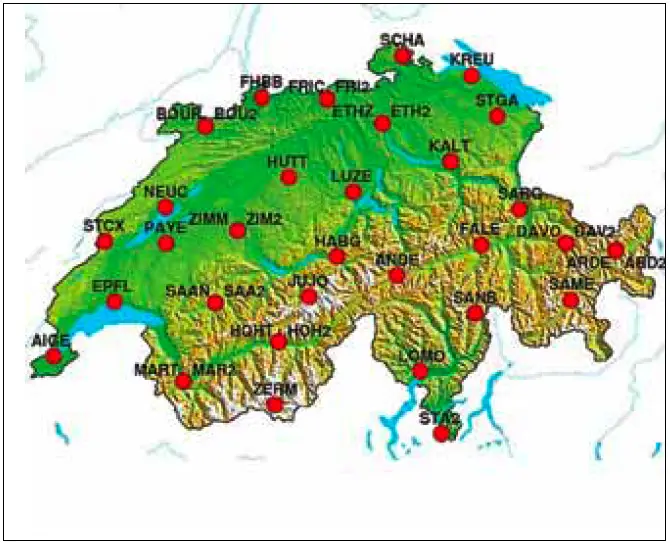
The Automated GNSS Network for Switzerland (AGNES) as of 2011
A difficulty in Switzerland is the height variation from the lowest point at 193 meters (above mean sea level) in Lake Maggiore to 4,634 meters on the peak of Monte Rosa. To best model the atmospheric errors, the stations should have similar altitudes because of the strong dependence of the troposphere error on receiver height. To this end, typically the Jungfraujoch (JUJO) station is not integrated into the error modeling, because its elevation of 3,582 meters is too high in comparison with the other stations in the surrounding area.
In my next post I will discuss about the challenges or requirements of VRS.
Related Topics:
