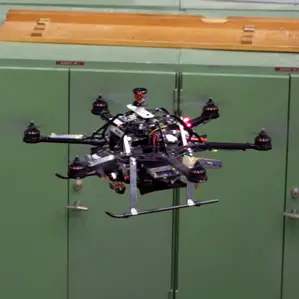
This quadrotor won’t bump into those pipes because it built itself a 3-D map of the space using its onboard sensors and computer. Credit: MIT Technology Review
MIT Technology Review – Researchers from the Swiss Federal Institute of Technology in Zurich are making drones more independent with a sense of building its own direction. They have demonstrated a small drone that can build its own 3D map of an unfamiliar environment with minimal help from a human operator, and then plan its own routes around a space and its obstacles autonomously.
The team has used a small quadrotor, and equipped it with a stereo camera and sensors that report velocity, orientation, and gravitational forces. Stereo camera helps to understand depth images to create a 3D map; places the drone can’t fly are blocked out. Once the map is complete, the drone can plan the most direct route possible to any target destination, flying around any mapped obstacles.
The drone needs some human help to get started in a new space. While an operator helps it make an exploratory flight around the new environment, the drone’s software builds a 3D map by comparing data from its motion and orientation sensors with images from its camera.
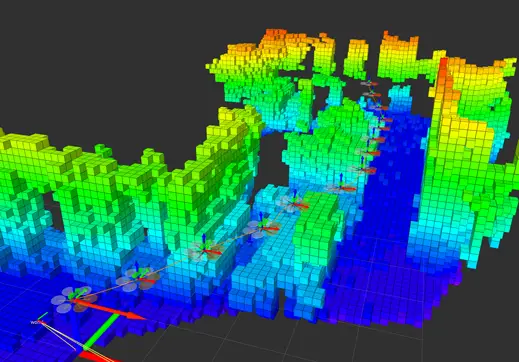
The drone uses its 3-D map to plan the most efficient route around a space. Credit: MIT Technology Review
“This is the first time we can show full mapping, relocalization—finding the drone on the map—and planning on board,” says researcher Michael Burri, who worked on the project.
The combination of software and sensors could make it easier to deploy drones for tasks like inspecting an oil rig, he says. A company would need to do one manual flight to have a drone build its map. For subsequent inspections, the drone could do the job autonomously.