Brian Davis a Research Fellow at University of Minnesota is working on LiDAR (light detection and ranging) technology for implementing in transportation systems.
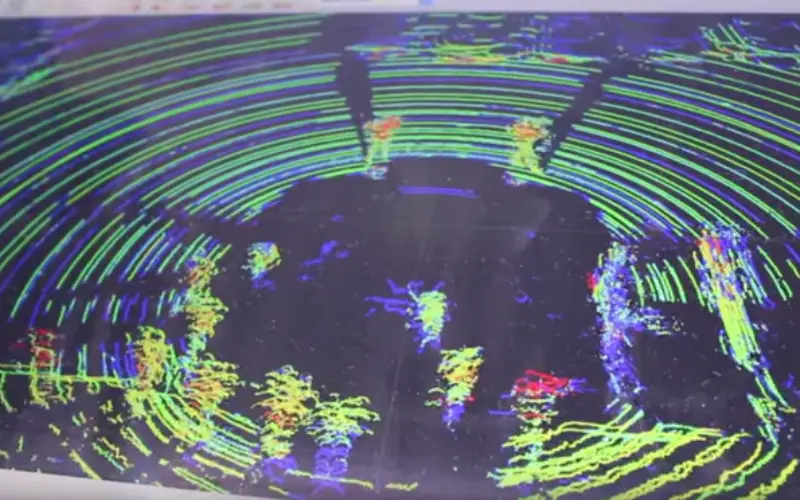
Davis and his fellow researchers have outfitted a sedan with special LiDAR equipment and other technology that is capable of capturing a 360-degree, 3-D views of a scene in real time.

Event attendees gather around a sedan outfitted with a spinning LiDAR sensor. (Photo by Micheal Foley, MnDOT)
In his presentation at the Olmsted County Public Works Service Center, Minnesota, Davis demonstrated a sedan outfitted with special LiDAR equipment and other technology that is capable of capturing a 360-degree, 3-D view of a scene in real time.
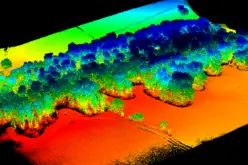
LiDAR uses light in the form of a pulsed laser to measure ranges (variable distances) to the Earth. A LIDAR instrument principally consists of a laser, a scanner, and a specialized GPS receiver. LiDAR data is represented in geometry known as point cloud. Point cloud is obviously a vector based structure – each point has its XYZ coordinates. You can every object on the surface through with LiDAR pulses are returned back such as people moving on street, trees, cars moving, buses and light rail trains.
Over the coming months, researchers will gather more data to develop a workshop for county personnel interested in learning more about LiDAR and how it can be applied in their transportation systems.
“The next steps for this project are to collect some data with the car at intersections. Then we can use that information to fine tune our algorithms,” Davis said. “What the algorithms are going to do is take that raw data and give us useful information, like the number of cars, or the time a car passes through an intersection. That all feeds into the workshop we’re developing. The workshop is going to be for county GIS workers, traffic engineers and county engineers who are interested in learning about these technologies.”
– Minnesota Transportation Research Blog